7-5 YOLO 環境の構築
この章では、NVIDIA Jetson Orin NXとそのJetson Linuxオペレーティングシステム上にYOLO11ランタイム環境をセットアップする手順を説明します。必要なハードウェアおよびソフトウェア構成、ならびに最適化手順について解説します。この章を完了すると、Orin NX上でYOLO11を正常に実行し、物体検出タスクを実行できるようになります。
学習目標
1. Jetson Orin NXのハードウェア仕様と、それがYOLO11環境に与える影響を理解する。
2. Orin NXハードウェア環境向けに最適化されたUltralytics YOLO11リポジトリをダウンロードし、セットアップする。
3. テスト例を実行し、YOLO11環境の正当性を検証する。
4. Jetsonプラットフォームにおける一般的な環境問題のトラブルシューティングと解決策を習得する。
YOLO11について
YOLO11は、リアルタイムの物体検出およびコンピュータビジョンタスク向けに特別に設計されています。改良されたバックボーンおよびネックアーキテクチャを採用し、特徴抽出機能を強化することで、より高い精度を実現しています。物体検出、インスタンスセグメンテーション、姿勢推定、画像分類など、マルチタスクをサポートしており、エッジデバイスに最適です。最適化されたトレーニングワークフローと柔軟なデプロイメントオプションにより、自動運転、セキュリティ監視、その他の分野で幅広く活用でき、優れたリアルタイム性能と汎用性を発揮します。
// Install ultralytics (PyTorch version must be higher than v1.8)
pip install ultralytics
//Reinstall a specific version of numpy
pip uninstall -y numpy
pip install "numpy<2"
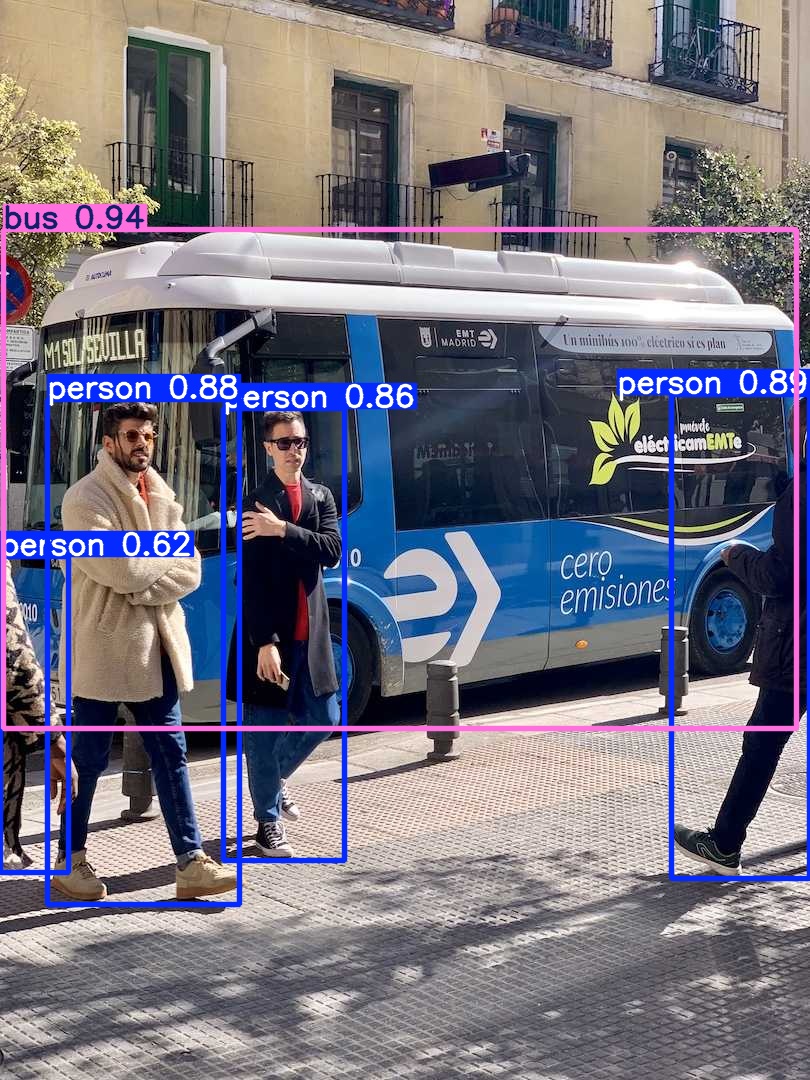
// Confirm successful installation via CLI
// Output results will be located under runs/detect/predict
yolo predict model=yolo11n.pt source='https://ultralytics.com/images/bus.jpg'